News
- NEW 03/2021 Two Papers accepted by ICRA 2021.
- 03/2021 One Paper accepted by CVPR 2021
- 10/2020 Return offer @ Facebook Reality Labs
- 02/2020 Research intern offer @ Facebook Reality Labs, summer 2020.
- 12/2019 One Paper published in Science Robotics 2019.
- 06/2019 One Paper accepted by IROS 2019.
- Best Paper Award in ACM Turing Celebration Conference (ACM TURC) 2019 .
- 03/2019 One Paper accepted by ACM TURC 2019.
- 05/2019 One Paper accepted by ICML Workshop 2019.
- 01/2019 One Paper accepted by ICRA 2019.
- 01/2019 One Paper accepted by AAAI Workshop 2019.
- 01/2018 Two Papers accepted by ICRA 2018.
- 06/2017 Two Papers accepted by IROS 2017.
Publications
|
Congestion-aware Multi-agent Trajectory Prediction for Collision Avoidance
Xu Xie,
Chi Zhang,
Yixin Zhu,
Yingnian Wu,
Song-Chun Zhu
IEEE International Conference on Robotics and Automation (ICRA) 2021
Paper /
Project /
Video /
Code
Predicting agents' future trajectories plays a crucial role in modern AI systems, yet it is challenging due to intricate interactions exhibited in multi-agent systems, especially when it comes to collision avoidance. This paper proposes to learn congestion patterns as contextual cues explicitly and devise a novel "Sense-Learn-Reason-Predict" framework by exploiting advantages of three different doctrines of thoughts.
|
|
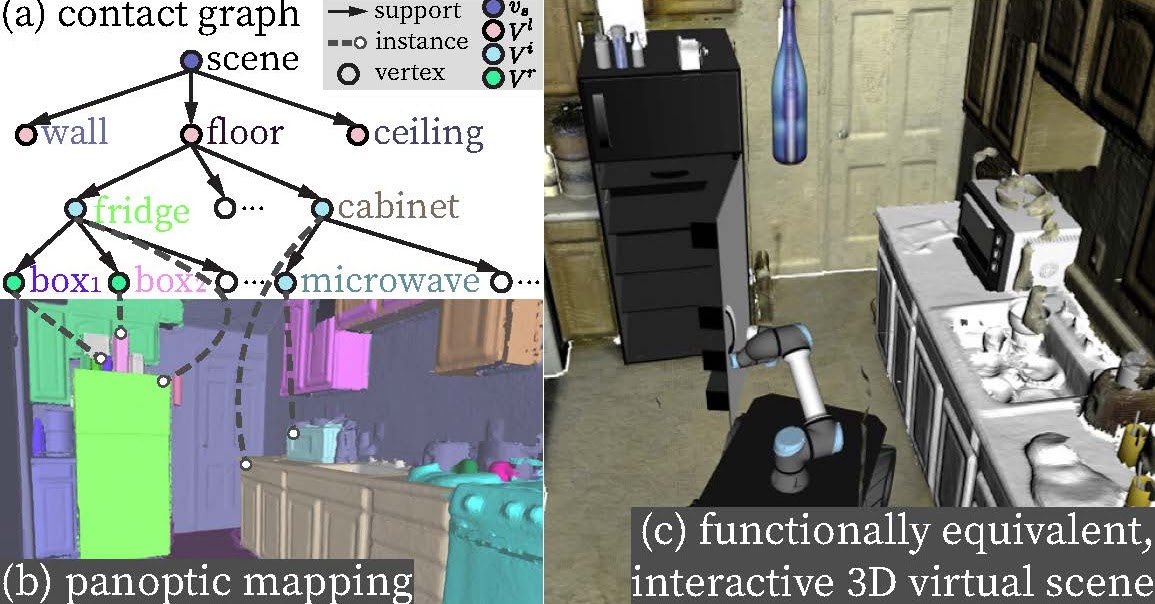
Reconstructing Interactive 3D Scenes via Panoptic Mapping and CAD Model Alignments
Muzhi Han,
Zeyu Zhang,
Ziyuan Jiao,
Xu Xie,
Yixin Zhu,
Song-Chun Zhu,
Hangxin Liu
IEEE International Conference on Robotics and Automation (ICRA) 2021
Paper /
Project /
Code
We rethink the problem of scene reconstruction from an embodied agent's perspective to emphasize the underlying functions and constraints such that the reconstructed scenes provide actionable information for simulating interactions with agents. Crucially, the reconstructed sene replaces the object meshes in the dense panoptic map with part-based articulated CAD models for finer-grained robot interactions.
|
|
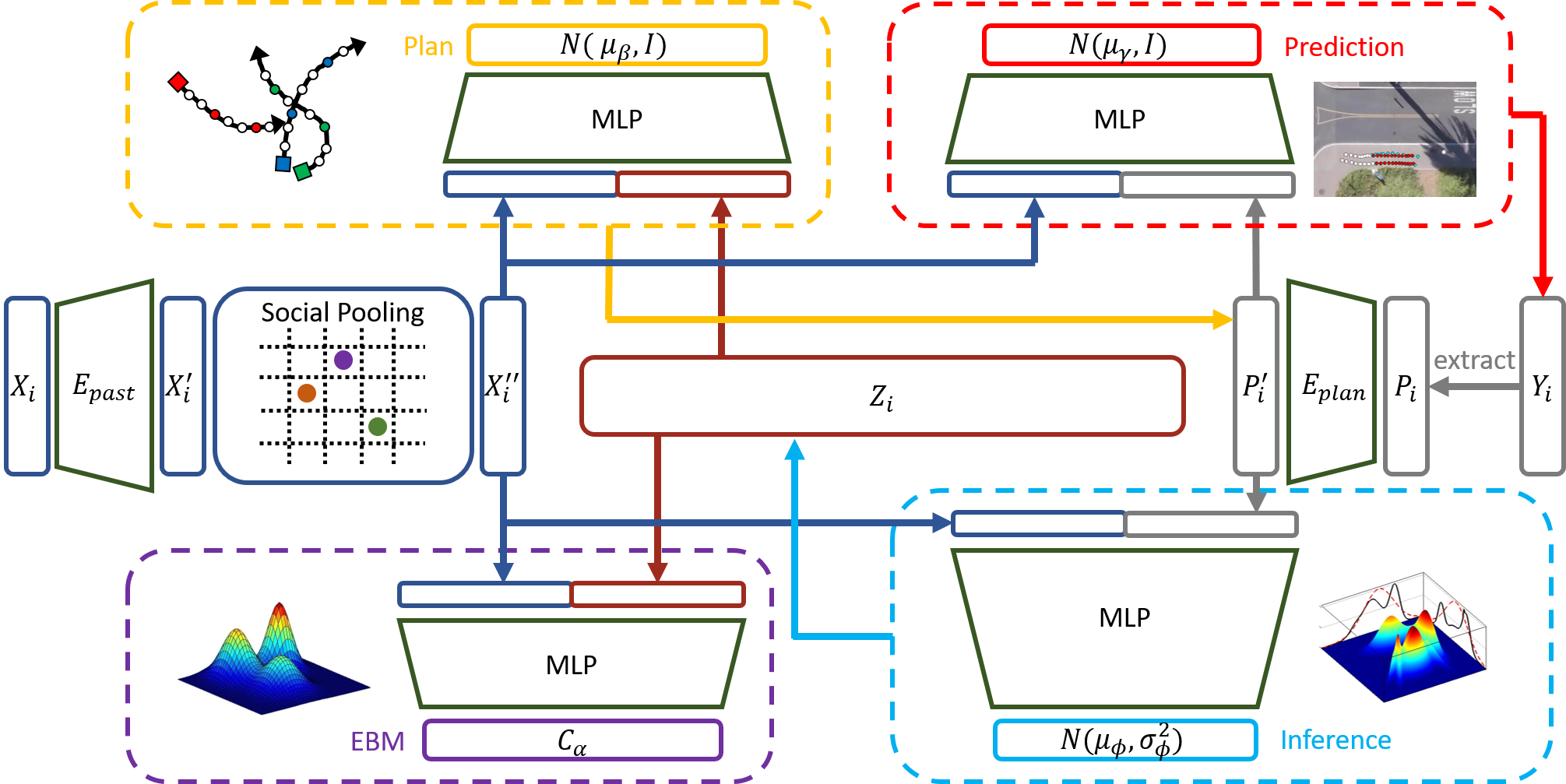
Trajectory Prediction with Latent Belief Energy-Based Model
Bo Pang,
Tianyang Zhao,
Xu Xie,
Yingnian Wu
IEEE Conference on Computer Vision and Pattern Recognition (CVPR) 2021
Paper
Human trajectory prediction is critical for autonomous platforms like self-driving cars or social robots. We present a latent belief energy-based model (LB-EBM) for diverse human trajectory forecast. The model is able to make accurate, multi-modal, and social compliant trajectory predictions and improves the SOTA performance on standard benchmarks.
|
|
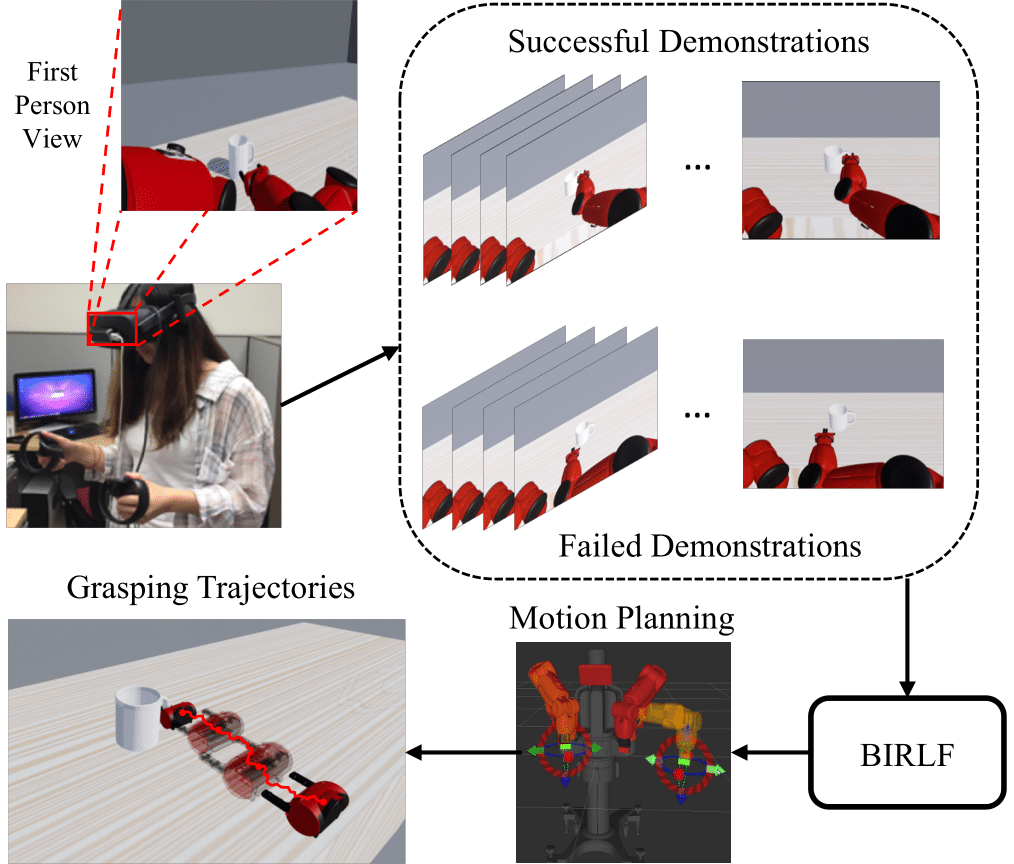
Learning Virtual Grasp with Failed Demonstrations via Bayesian Inverse Reinforcement Learning
Xu Xie,
Changyang Li,
Chi Zhang,
Yixin Zhu,
Song-Chun Zhu
IEEE International Conference on Intelligent Robots and Systems (IROS) 2019
Paper /
Demo /
Project /
Code
Propose Bayesian Inverse Reinforcement Learning with Failure (BIRLF), which makes use of failed demonstrations that were often ignored or filtered in previous methods due to the difficulties to incorporate them in addition to the successful ones.
|
|
VRGym: A Virtual Testbed for Physical and Interactive AI
Xu Xie,
Hangxin Liu,
Zhenliang Zhang,
Yuxing Qiu,
Feng Gao,
Siyuan Qi,
Yixin Zhu,
Song-Chun Zhu
ACM Turing Celebration Conference (ACM TURC) 2019
Paper /
Supplementary /
Demo /
Project /
Code
Propose VRGym, a virtual reality testbed for realistic human-robot interaction. VRGym emphasizes on building and training both physical and interactive agents for robotics, machine learning, and cognitive science.
|
|
VRKitchen: an Interactive 3D Virtual Environment for Task-oriented Learning
Xiaofeng Gao,
Ran Gong,
Tianming Shu,
Xu Xie,
Shu Wang,
Song-Chun Zhu
International Conference on Machine Learning Workshop (ICMLW) 2019
Paper /
Project /
Design and implement a virtual reality (VR) system, VRKitchen, with integrated functions to provide demonstrations for training agents as well as standardized evaluation benchmarks.
|
|
High-Fidelity Grasping in Virtual Reality using a Glove-based System
Hangxin Liu,
Zhenliang Zhang,
Xu Xie,
Yixin Zhu,
Yue Liu,
Yongtian Wang,
Song-Chun Zhu
IEEE International Conference on Robotics and Automation (ICRA) 2019
Paper /
Poster /
Demo /
Code
Propose a design that jointly provides hand pose sensing, hand localization, and haptic feedback to facilitate real-time stable grasps in Virtual Reality (VR). Such a glove-based system can simplify the data collection of human manipulations with VR.
|
|
Intention-based Behavioral Anomaly Detection
Fan Hung,
Xu Xie,
Andrew Fuchs,
Michael Walton,
Siyuan Qi,
Yixin Zhu,
Doug Lange,
Song-Chun Zhu
Association for the Advancement of Artificial Intelligence Workshop (AAAIW) 2019
Paper
Propose a method for detection of anomalous behaviors based on agent intent formulated using agent-based Lagrangian Mechanics. The method simultaneously learns to predict intended agent goals and detect anomalies based on predictions.
|
|
Unsupervised Learning using Hierarchical Models for Hand-Object Interactions
IEEE International Conference on Robotics and Automation (ICRA) 2018
Paper /
Poster /
Demo /
Code /
Bibtex /
Project
Propose an unsupervised learning approach for manipulation event segmentation and manipulation event parsing. The proposed framework incorporates hand pose kinematics and contact forces using a low-cost easy-to-replicate tactile glove.
|
|
Interactive Robot Knowledge Patching using Augmented Reality
Hangxin Liu,
Yaofang Zhang,
Wenwen Si,
Xu Xie,
Yixin Zhu ,
Song-Chun Zhu
IEEE International Conference on Robotics and Automation (ICRA) 2018
Paper /
Poster /
Demo /
Code /
Bibtex /
Project
Present a novel Augmented Reality (AR) approach, through Microsoft HoloLens, to address the challenging problems of diagnosing, teaching, and patching interpretable knowledge of a robot.
|
|
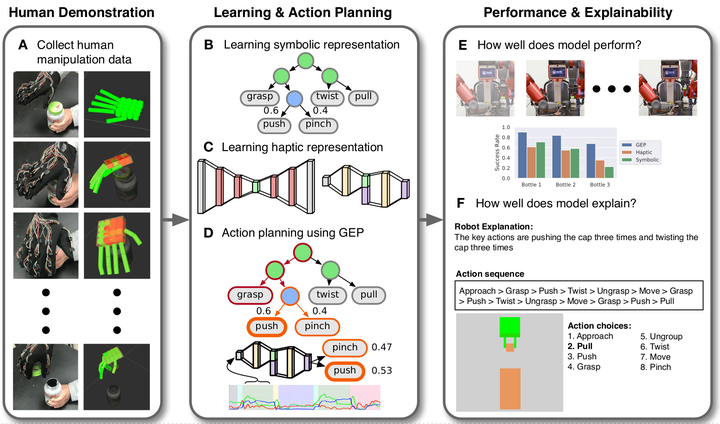
Feeling the Force: Integrating Force and Pose for Fluent Discovery through Imitation Learning to Open Medicine Bottles
Mark Edmonds,
Feng Gao,
Xu Xie,
Hangxin Liu,
Siyuan Qi,
Yixin Zhu,
Brandon Rothrock,
Song-Chun Zhu
IEEE International Conference on Intelligent Robots and Systems (IROS) 2017
Paper /
Demo /
Code /
Bibtex /
Project
Learn a manipulation model to execute tasks with multiple stages and variable structure, which typically are not suitable for most robot manipulation approaches. The model is learned from human demonstration using a tactile glove that measures both hand pose and contact forces.
|

|
A Glove-based System for Studying Hand-Object Manipulation via Joint Pose and Force Sensing
Hangxin Liu,
Xu Xie,
Matt Millar,
Mark Edmonds,
Feng Gao,
Yixin Zhu,
Veronica Santos,
Brandon Rothrock,
Song-Chun Zhu
IEEE International Conference on Intelligent Robots and Systems (IROS) 2017
Paper /
Code /
Bibtex /
Project
Present a design of an easy-to-replicate glove-based system that can reliably perform simultaneous hand pose and force sensing in real time, for the purpose of collecting human hand data during fine manipulative actions.
|
|
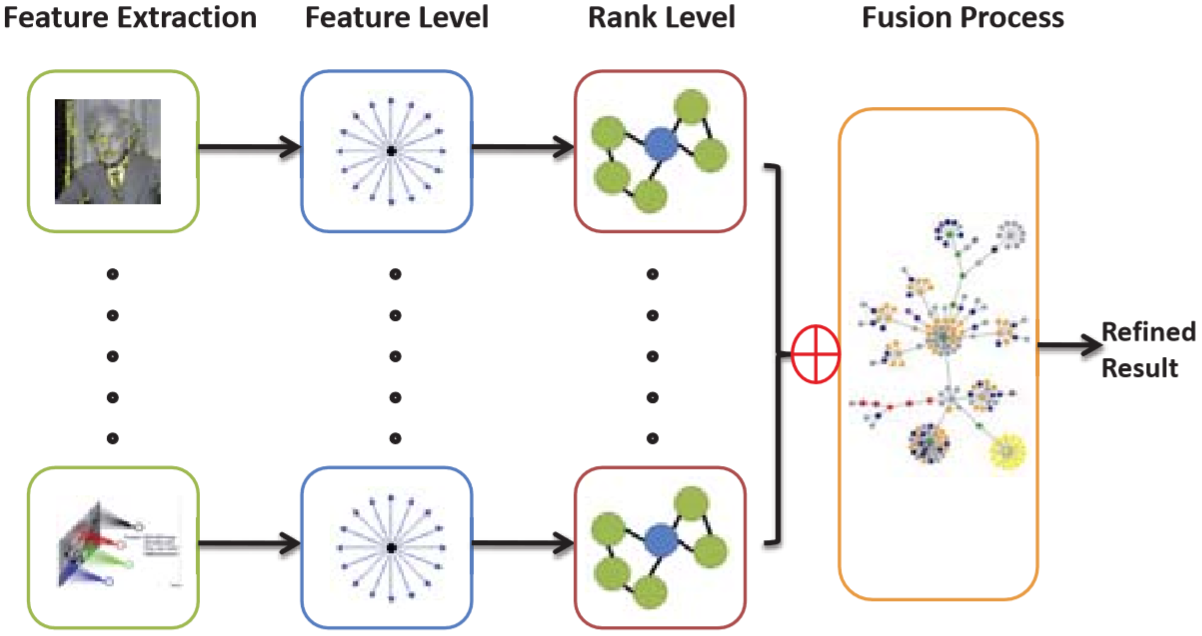
Rank-Aware Graph Fusion with Contextual Dissimilarity Measurement for Image Retrieval
Xu Xie,
Wengang Zhou,
Houqiang Li,
Qi Tian
IEEE International Conference on Image Processing (ICIP) 2015
Paper /
Bibtex
Propose a rank-aware graph fusion scheme to fuse the results from multiple retrieval methods. Evaluation on two public datasets demonstrates the effectiveness of our approach.
|
|